|特集| 無人化施工
デジタル化・省人化時代の現場づくり。
大成建設による建機自律化の拡大と協調運転プラットフォーム
建設業界喫緊の課題の1つに、「担い手」の数という問題がある。就業者数の減少や高齢化など、近い将来において建設業の生産体制を担うべき産業人口の激減が危惧されており、建設業界は「担い手」である若年者の入職促進・定着率向上に努めている最中だ。また「担い手」確保とともに業界の課題とされる「生産性向上」には、作業機械や重機の自律駆動といったアプローチが含まれている。そうした自動化の追求は、小人数でも施工を進められる技術を確立する「省人化」の取組みとして、産業人口減少への対処も含意していると言えよう。
こうしたキーワードが飛び交う建設業界で、総合建設企業(ゼネコン)として建設機械の自動・自律化に取組んでいるのが大成建設㈱だ。直近の取組みや将来的な現場づくりの展望について、同社メカ・ロボティクス推進室にお話をうかがった。
大成建設株式会社
土木本部
機械部 部長(メカ・ロボティクス担当)/メカ・ロボティクス推進室長 中野 正晴 氏
機械部 メカ・ロボティクス推進室 課長 若山 真則 氏
大成建設における自律操縦建機開発
大成建設㈱は1990年代の雲仙普賢岳噴火災害復旧工事以来、現場の無人化を可能とする技術開発に取り組み続けてきた。同工事における建機の無線遠隔操縦技術を皮切りに、90年代終盤にはトラクターショベルの自律走行、2010年代からは建機の自律化モデルの開発に取り組み、リリースし続けている。またハード面だけでなく、そうした建機の自律制御を可能とする電子制御システムなど、ソフト面の開発も併行して進めている。
はじめに、現在取り組まれている自律型建機開発の概要や、それらによって解決すべき課題についてうかがった。
大成建設が手掛ける作業用ロボット「T-iROBO®」シリーズ
大成建設が開発した自律型建機はT-iROBO®シリーズと銘打たれ、振動ローラー(T-iROBO® Roller)やバックホウ(T-iROBO®
Excavator)など、土木工事用建機としてはこれまでに7機種が発表されている。現在開発対象となっているのは、転圧や掘削、運搬などといった、主にシンプルな動作を反復する作業を担う機種。反復動作のほうが機械に任せやすく、技術的にも実現しやすいのだ。
これに加えて、T-iROBO®との組み合わせにより作業を完全自動化するシステムも開発している。連続的に締固め度を測定できる輪転型RI密度測定器「T-iCompaction」は、自動化した振動ローラーに搭載することで自動施工と計測を同時に遂行させ、基準を満たさない締固め度の箇所を自動で再転圧するようにできるなど、作業の効率化・自動化に大きく貢献する。
同社はこうした自律駆動型の重機・作業機械の開発に取り組み、実証試験や現場への導入試験を継続しながら、施工の革新を目指し続けている。
〝One Man, One Drive, OnSite-Work〟から〝One Man, N-Drive, Tele-Work〟へ
一連の技術開発に対しては、どのような課題が抽出されているのだろうか。やはり担い手不足の問題が前提にあると、大成建設のメカ・ロボティクス推進室 若山真則課長は語る。
「『生産性向上』というキーワードがありますけれども、加速度的に減少する産業人口の問題を考えると、向上以前に、まずは現在の生産能力を維持しなければならない。こうしたことが背景となっています」
また政府が掲げる施策においても自動・自律運転による施工のデジタル化が掲げられているが、このような業界・国策上の問題意識を踏まえ、同社はこれまで無人化・自動化機械開発のロードマップを策定の上、技術開発を進めてきた。そうして世に生み出されてきたのがT-iROBO®シリーズ等の新技術だ。この研究開発の過程で大成建設が描いてきた将来像はどのようなものだったのか。若山氏がさらに続ける。
「これまでの建設現場では〝One Man, One Drive,
OnSite-Work〟。1人が1台の機械を現場で操作するというのが常です。しかし、産業人口の減少という課題へ対処していくためには、〝One Man, N-Drive,
Tele-Work〟。1人が複数台の機械を、現場以外の場所で操作するような仕組みをつくっていかなければなりません。当社の目標は、この仕組みづくりにあります」

取材に応じてくださった若山真則氏(大成建設㈱ 土木本部 機械部 メカ・ロボティクス推進室 課長)
建機自動化の舞台はトンネル坑内へ。
T-iDraw Mapによる国内初の坑内自動運転
薄明かりのトンネル坑内を、小型のクローラキャリアが進む。履帯の足取りは滑らかに、着実に現場の中を歩んでいく。不意に、暗がりの中から赤いロードコーンの姿が進路方向上に立ちはだかる。キャリアは当たり前のように減速し、方向転換をしてからコーンを避け、再び坑内を進み始めた……。
これは、建設現場では日常的な1コマに過ぎない情景だ。だが、通常とは決定的な違いがある。この車両には、人が乗っていないのだ。先ほどの衝突回避と進路の修正は、すべて建機が自律的に判断・実行したものである。国内で初めてトンネル坑内における建機の自律運転を可能にした技術「T-iDraw
Map」についてお話をうかがった。
閉鎖空間における位置情報取得の難しさ
「T-iDraw Map」による建機の自律運転は、これまで大成建設が手掛けた自律走行モデルとは異なる位置情報の取得方式を採用した点に特徴があるという。
建機の自律運転は、自機が向かうべき作業地点はどこで、現在その地点からどれだけ離れたところにいるのかなど、位置情報を基点に制御されている。その位置情報は、これまでGPSなど人工衛星を活用したGNSS技術※を利用するのが主流だ。しかし、全ての現場でGPS/GNSSが利用できるわけではない。
「たとえば町中であれば、GPSは概ねどこでも利用できます。ところが建設現場となると、それが利用可能な現場というのが非常に限られてきます」
こう説明してくれたのは、メカ・ロボティクス推進室の中野正晴室長だ。GNSSを利用するためには、電波が届きやすい場所という条件が不可欠だ。最も適した場所は屋外の開放的な空間、つまり〝明かり〟の工事現場のような場所である。一方、屋内やトンネル坑内といった閉鎖空間では、電波自体が届かないことのほか、周囲にある建物等の構造物の干渉を受けることが原因で、正確ではない位置情報を取得してしまうことがある。
「こうしたことが自動建機の運転で起きてしまうと、うまく制御できません。となると現実的には、大規模な土地造成やダム建設の現場のように、かなり開けた場所でなければGNSSが使えないことになります。そこで、屋内や坑内での施工を考えた場合、やはりGNSS以外で自動建機の〝眼〟になるものが必要だと考えました」
※ 全地球を対象とする人工衛星とのデータ通信により、地上における位置を計測するシステム(Global Navigation Satellite
System)。GPS(Global Positioning System)もこの1種。

取材に応じてくださった中野正晴氏(大成建設㈱ 土木本部 機械部 部長〔メカ・ロボティクス担当〕/メカ・ロボティクス推進室長)
GPS/GNSSに代わる建機の〝眼〟
GNSSに代わる建機の〝眼〟として注目したのが、SLAM(Simultaneous Localization And
Mapping;スラム)という技術だ。大成建設は「3D-LiDAR(ライダー)」というレーザー光による空間センサーを採用することで、周辺状況のデータ化と車両の位置把握を実現した。
T-iDraw
Mapによる測位と走行制御は、2つのステップで行われる(図A)。まずは自動走行させたい経路を有人走行で進むが、このとき建機に搭載された計測器から周囲一帯へレーザー光を照射。レーザーが周囲の物体(トンネル壁面や人・障害物等)に当たるまでの距離を計測し、光が衝突したポイントを距離に基づいてマッピングすると、点群データにより立体的な環境地図を形成する(図Bb:緑・水色等の点)。その後、有人走行時のルート(図Bb:赤点・青線)をなぞるように無人建機が自動走行する。このときもレーザー照射が行われていて、走行中に計測したデータと事前に作成した環境地図を照らし合わせることで、建機は自機の現在地をリアルタイムで把握。進路の補正やルート上に検知した障害物の回避といったことが可能となる。開発にあたっては点群として収集される膨大なデータの取捨選択に苦心したと若山氏は言う。
「どこのデータを使えばいいのか、取得する膨大なデータを使う/使わないという判断が開発の肝でした。センサーの死角になってデータが取れない場所もありましたが、それでも最低限ここは必要だというようなところをピックアップして、対応できるようにしました」
このような技術を採用することで、同社はGNSSが利用できない場所においても自動建機に〝眼〟を持たせることに成功した。現在T-iDraw
Mapは履帯式運搬車での実証実験を終え、今後はより現場での活躍が期待できるタイヤ式建機への適用から、地下での自動運転や災害発生時における探査・点検への拡大を目指すとのことである。
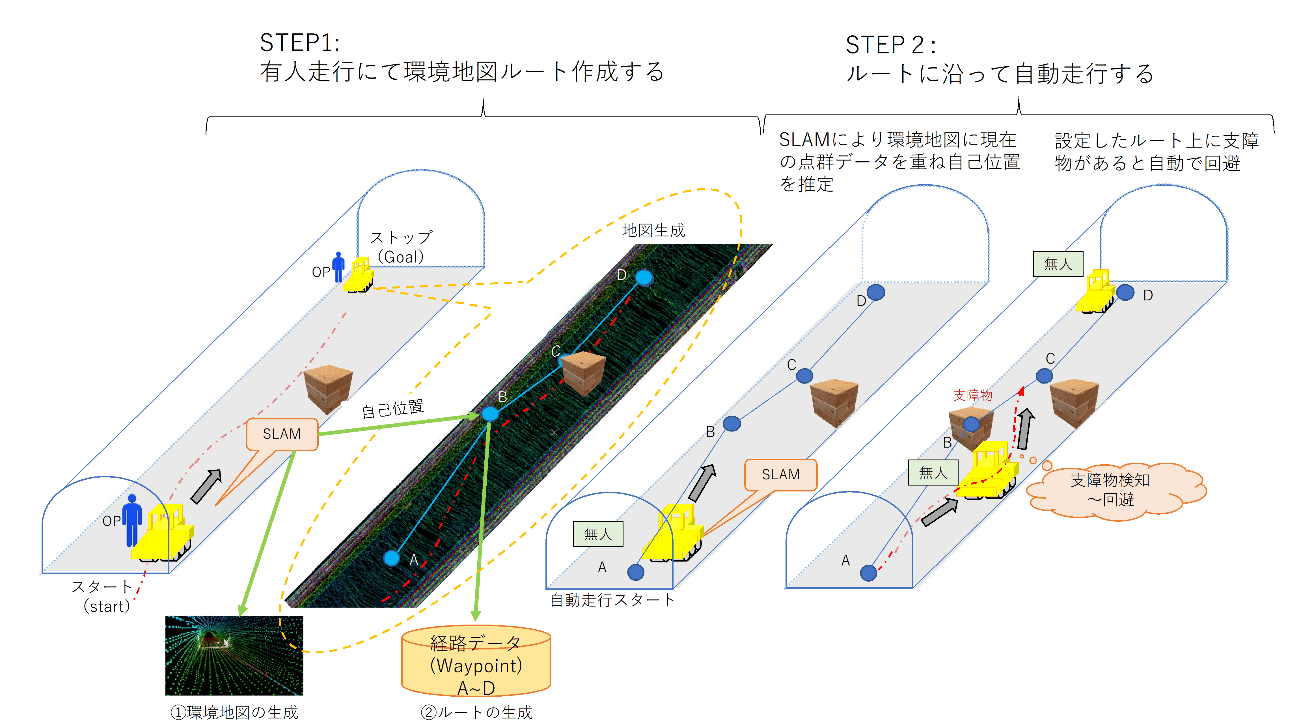
【図A】大成建設「T-iDraw Map」の走行ステップ概要。有人走行による環境情報の記録・環境地図作成と、これに基づく自動走行および障害物回避行動。〔提供:大成建設㈱〕

【図Ba】T-iDraw Mapによるトンネル坑内での自動運転風景。走行中もレーザー計測を行い、図Bbのようなマッピングによってリアルタイムで建機の位置情報を把握している。〔提供:大成建設㈱〕
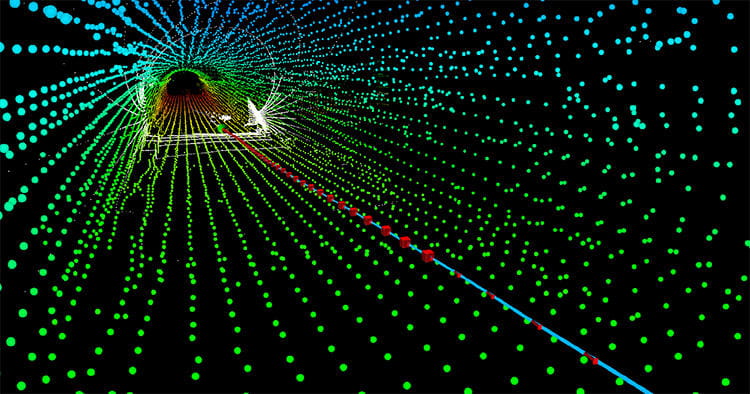
【図Bb】センシング装置によって取得した点群データは、環境地図としてマップデータ化(緑・水色の点)される。そのマップ内における自己の位置を建機が把握し、走行予定ルートを描く(赤点・青線)。〔提供:大成建設㈱〕
「T-iDraw Map」によるトンネル坑内での無人建機自動運転
〔提供:大成建設㈱〕
ステージは建機の自動化から自動建機の協働へ。
建機協働プラットフォームプロジェクト
T-iROBO®シリーズやT-iDraw Mapなど、大成建設が研究開発を続ける先進技術。これらは〝One Man, One Drive, OnSite-Work〟から〝One Man, N-Drive, Tele-Work〟へという時代の要請に応答するものある。では〝One Man, N-Drive, Tele-Work〟の時代が来たとき、建設企業には何が求められるのか。最後に、最大手ゼネコンの1角として業界をけん引する同社の展望をうかがった。
自動化建機の協調運転制御システム「T-iCraft®」
大成建設は2021年2月、複数の自動建機を協調させる制御システム「T-iCraft®」の開発と実証実験の成功を発表した。実証実験はバックホウ・クローラーダンプ・振動ローラー・ブルドーザーの4機種によって行われる「掘削・積込」「運搬」「敷均し」「転圧」を全自動で遂行するもので、T-iCraft®は各建機の位置やタスク遂行状況を把握し、それぞれの建機へ指示を出す「司令塔」の役割を果たす。たとえばバックホウが掘削を終えればダンプが積込位置まで自走・待機するよう指示を出すなど、タスク完了や所定位置への走行をT-iCraft®が統括している(動画参照)。
さらに、T-iCraft®には無人建機と有人建機の協働も実現可能という特徴がある。有人建機のオペレーターがタブレット端末を使ってT-iCraft®と通信して無人建機への指示出しを行うことができ、まさに〝One man, N-Drive〟が現実のものとなりつつある。また今回実証されたのはGNSSに基づく自律制御モデルの建機だが、先に紹介したT-iDraw MapをT-iCraft®と連携させることによって、今後はトンネル坑内や屋内での協調運転制御の実現が期待されている。
協調運転制御システム「T-iCraft®」による自動建機の協働
自律運転建機の協調運転システム「T-iCraft®」による建機協働の実証実験風景。4つの建機はそれぞれ自律運転しており、T-iCraft®は各建機の位置情報やタスク完了を把握し、次のタスク実行命令を出す「司令塔」の役割を担う。〔掲載許諾:大成建設㈱〕
技術開発の次を見据え、自動化時代のプラットフォームを準備
当初は独自開発の専用機による自律化を手掛けてきた大成建設だが、同社の最終目標は建機自体の開発ではないという。
「既に建機メーカーが自動建機を発表し始めており、我々としても今後、メーカー製自動建機が続々と現場に導入されるようになると考えています」
と若山氏。実際に、T-iCraft®の実証実験に用いた自動建機もメーカー製の機種だった。同社としては、こうした他社製建機を前提とした技術開発を行っていかなければならないと考えていると言う。
「自社開発の自動建機を協調運転するシステムであれば、ソフトウェアと一体的に開発することで効率的に実現できるでしょう。しかし本来、自動建機の開発は建機メーカーの範疇。続々と登場するであろう他社製の自動建機を見越して、そうした建機を取り込んで協働させられるプラットフォームを先に用意しておこうというのが、我々の考えです」
自動建機が当たり前のようにリリースされる状況になったとき、ゼネコンとして向き合うのは、いかにしてそれらを効率的に活用するかということ。すなわちそれは、自動建機が標準となる時代における、建設企業の現場づくりに直結する。大成建設が抱く現場づくりへの情熱は今、T-iROBO®シリーズやT-iDraw Mapなど個々の技術として結晶し、自動建機の適用可能性を拡げ続けている。そして、それらが協奏させるプラットフォーム構想こそが、T-iCraft®の真髄なのだろう。今後も同社が描く現場の未来像から、目を離すことはできない。